=Overview
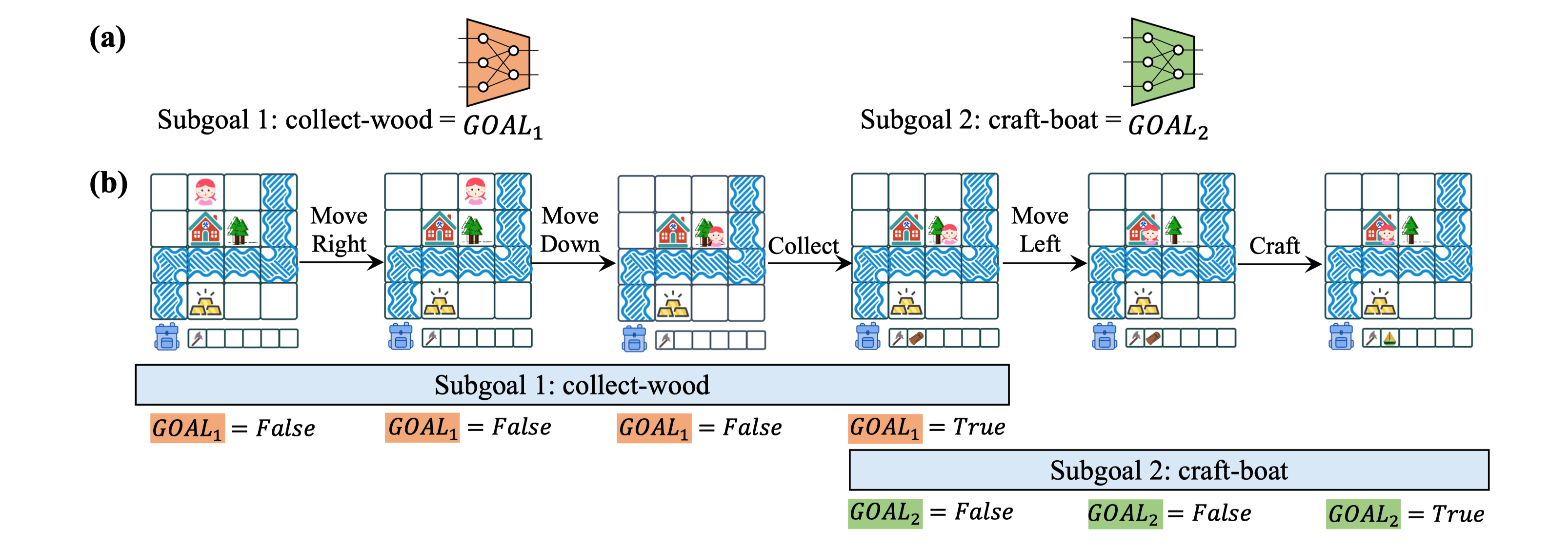
Figure 1: Interpreting a demonstration and its description in terms of RSGs: (a) Each RSG is represented as a subgoal G o . (b) The system infers a transition to the next subgoal if the G condition is satisfied. Such transition rules can be used to interpret demonstrations and to plan for tasks that require multiple steps to achieve.
Abstract: We present a framework for learning useful subgoals that support efficient long-term planning to achieve novel goals. At the core of our framework is a collection of rational subgoals (RSGs), which are essentially binary classifiers over the environmental states. RSGs can be learned from weakly-annotated data, in the form of unsegmented demonstration trajectories, paired with abstract task descriptions, which are composed of terms initially unknown to the agent (e.g., collect-wood then craft-boat then go-across-river). Our framework also discovers dependencies between RSGs, e.g., the task collect-wood is a helpful subgoal for the task craft-boat. Given a goal description, the learned subgoals and the derived dependencies facilitate off-the-shelf planning algorithms, such as A ∗ and RRT , by setting helpful subgoals as waypoints to the planner, which significantly improves performance-time efficiency.
=Resources
- RSG in [PyTorch (Official)].